
Ученые Пермского Политеха разработали инновационный метод управления роботами, который позволяет эффективно диагностировать трубопроводы с изгибами и поворотами. Это изобретение уже получило патент и может значительно улучшить мониторинг состояния нефте- и газопроводов.
Современные трубопроводы требуют регулярного контроля для предотвращения аварий и утечек. Для этого все чаще используются автономные роботы, способные обнаруживать повреждения, такие как коррозия, износ и трещины. Однако существующие модели роботов часто сталкиваются с трудностями при прохождении криволинейных участков труб, что снижает их эффективность.
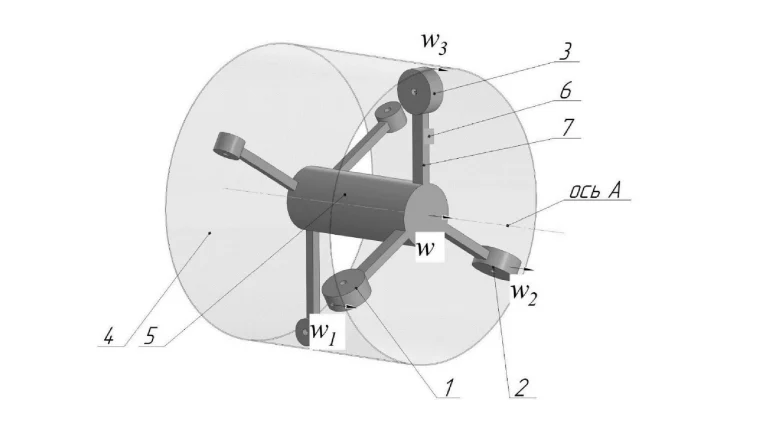
Ученые Пермского Политеха предложили решение этой проблемы. Они разработали способ управления роботом, который обеспечивает его устойчивую ориентацию и проходимость даже на сложных участках трубопровода. Метод основан на использовании робота с тремя приводными колесами, каждое из которых оснащено независимым двигателем. При прохождении изгибов два колеса вращаются с одинаковой скоростью, а третье — с увеличенной. Это позволяет устройству точно определять радиус кривизны и адаптировать свою скорость для оптимального движения.
«Наш метод позволяет роботу быстро ориентироваться в пространстве и преодолевать сложные участки без потери управляемости», — поясняет Дмитрий Кучев, ассистент кафедры «Оборудование и автоматизация химических производств» ПНИПУ.
Новая разработка ученых Пермского Политеха открывает перспективы для более качественного и быстрого мониторинга промышленных трубопроводов. Это особенно важно для предотвращения аварий и снижения экологических рисков. Изобретение может быть применено в нефте-, газопроводах и тепловых сетях, что делает его универсальным инструментом для диагностики трубопроводных систем.
Источник: naked-science
Фото: Конструкция внутритрубного робота. 1 – первое приводное колесо; 2 – второе приводное колесо; 3 – третье приводное колесо; 4 – трубопровод; 5 – внутритрубный робот; 6 – гироскоп / © Михаил Григорьев, Getty images





